皆様こんにちは。ISO 13855:2024 シリーズも今回がいよいよ最終回となります。
これまでの記事とあわせてお読みいただくと、より理解が深まる内容となっております。さて、皆様は「メーカーに勧められたから」という理由だけで、インターロック機器をガードに取り付けてはいませんか。
厳しい言い方になりますが、機器メーカーはあくまでインターロック機器を販売する立場であり、皆様の現場や設計の安全性までを完全に保証してくれるわけではありません。機器メーカーの営業担当者の言葉や、コンサルティング業者の助言を鵜呑みにした結果、安全規格に適合していない事例を私は数多く見てきました。皆様が想像されている以上に。現場にはそうした「見落とし」が潜んでいるのです。
 ジュンイチロウ
ジュンイチロウメーカーの営業に言われるがまま、インターロックスイッチつけました!
 中の人
中の人ぶっちゃけ、インターロックスイッチを付けたら終わりと思っていませんか?
だからこそ、このシリーズを通じて正しい知識をお伝えしたいと考えました。今回は、設計者自身が判断軸を持つために不可欠な「インターロック機器と分離距離」について解説します。

1. なぜ物理的なガードに「分離距離」が必要なのか
まず初めに、そもそもなぜ物理的なガードに分離距離の計算が必要となるのか、その背景から確認していきましょう。
「扉が開いたら機械が止まるのだから、危険源に手が届く前に機械は止まっているはずだ」と直感的に思われるかもしれません。しかし、現実の機械やインターロック装置のメカニズムは、そこまで理想的には動いてくれません。インターロック装置が作動して安全機能が開始される「前」に、ガードを部分的に開くことが可能であるという物理的な現実が必ず存在します。
たとえば、横にスライドする直線的な動きの扉であれ、蝶番を軸とする角度を持った開き戸であれ、インターロック装置のアクチュエータ(操作キーなど)がスイッチ本体から完全に引き抜かれ、制御システムに対して「扉が開いた」という信号を発するまでには、構造上の遊びやヒステリシス(動作特性のズレ)が存在します。さらに、チェーンやケーブルなどの柔軟な要素でガードを固定している特殊なケースでは、安全機能が開始される前に、ガード全体が意図せず大きな開口部(規格ではこれを e と呼びます)を形成してしまうことがあります。
つまり、機械が停止信号を受け取るまさにその瞬間に、すでにガードには「隙間」ができているのです。この「安全機能が働く直前に生じる隙間」から、作業者の手や指、あるいは身体の一部が入り込み、惰性で動いている危険源に到達してしまうリスクを評価しなければなりません。だからこそ、インターロック付ガードにも厳密な分離距離 S の設定が必要となるわけです。
2. ガードロックなしインターロック装置の分離距離算出(12.2項)
それでは、具体的な規格の内容に入っていきましょう。
ISO 13855:2024 の 12.2項では「ガードロックを持たないインターロック装置」に関する要件が定められています。これは、作業者がハンドグリップなどを引けば、いつでも自由に開けることができる一般的な扉を指します。
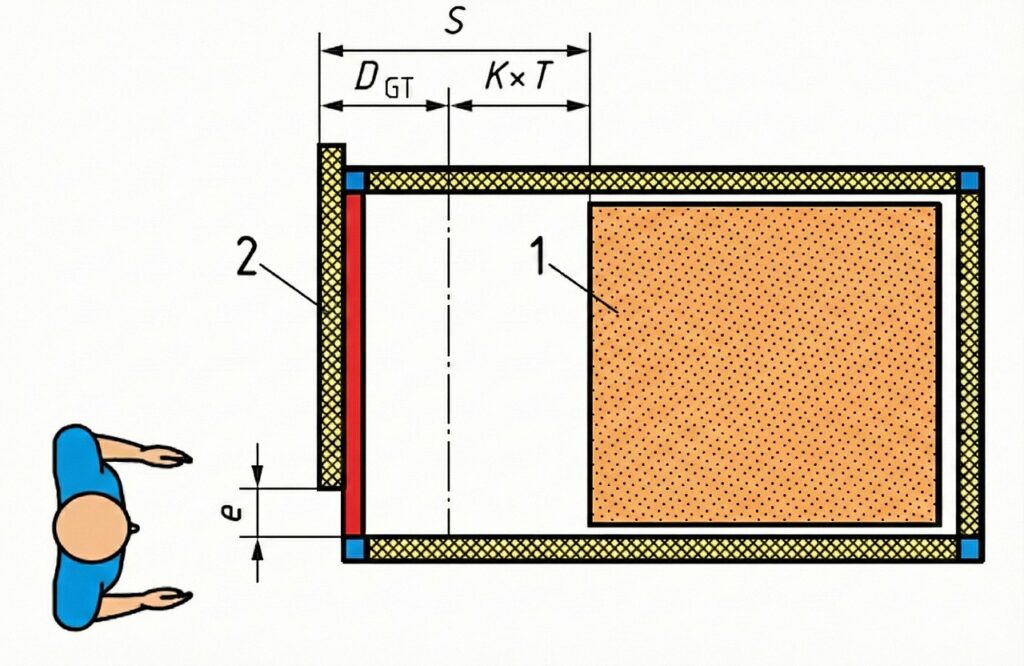
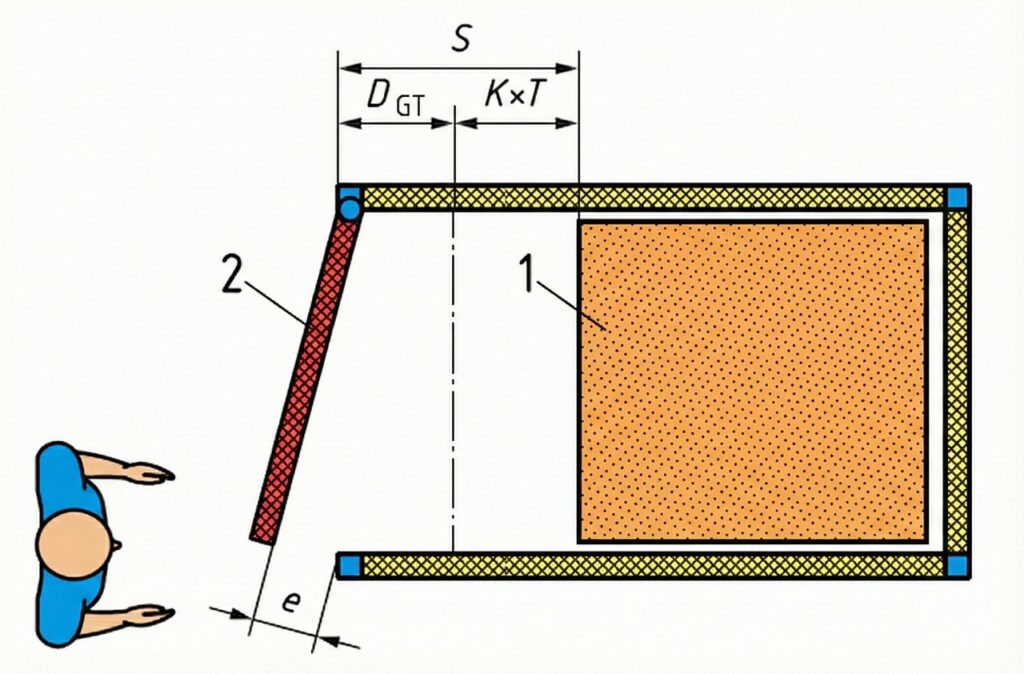
意図するリスク低減が達成される(機械が完全に安全な状態になる)前に、ガードの開口部から危険源に到達できないようにするため、インターロック付ガードの開口部の最も近い端から危険源までの分離距離 S を算出する必要があります。規格では、以下の数式(式 36)が提示されています。
$$S = (K \times T) + D_{GT}$$
- S: 分離距離 [mm]
- K: 人体の接近速度 [mm/s]
- T: 全体システム応答時間 [s]
- DGT: 防護構造物(インターロックガードなど)を通しての到達距離 [mm]
一見するとシンプルな数式ですが、ここに込められた設計者へのメッセージは非常に深いものがあります。それぞれの変数について、実務的な視点からさらに詳しく見ていきましょう。
2.1 接近速度 K=1600mm/s に込められた実務への配慮
まず注目すべきは、人体の接近速度 K です。ライトカーテンなどの計算において、手や腕の素早い動きを想定する場合、接近速度は K=2000mm/s が適用されるのが一般的です。しかし、ISO 13855:2024 の第12章では、ガードロックなしインターロック付ガードを開ける際の接近速度として、K=1600mm/s を明示的に指定しています。
したがって、私たちが実務で使用する数式は、実質的に以下のようになります(式37)。
$$S = (1600 \times T) + D_{GT}$$
なぜ 2000mm/s ではなく 1600mm/s なの??
この 1600mm/s という値は、一般的に「歩行速度」として適用される定数です。規格の注記には、この速度を採用した人間工学的な根拠が記されています。それは、インターロック付ガードを開ける際のアプローチ運動が、不随意な反射運動(転びそうになってとっさに手が出るなど)ではなく、「意図的なアクセス」から生じるものだからです。
皆様も、工場の現場で設備の扉を開ける際の動作を思い浮かべてみてください。扉の取っ手を引き、扉が自分の方へ向かって開いてくる、あるいは横にスライドしていくとき、人は無意識のうちにガードの部品や機械本体との衝突を防ごうとします。そして、手を中に入れる前に、手が入るだけの適切な大きさの開口部ができるのを待つという行動をとります。このような人間の自然な行動特性を考慮すれば、ライトカーテンに手を突っ込むような 2000mm/s という過酷な速度を前提とする必要はないのです。
この 1600mm/s の採用は、設計者にとって非常にありがたい配慮です。アメリカのOSHA(労働安全衛生局)の要件などでも 63in/s(約1600mm/s)という類似の接近速度が用いられることがありますが、国際規格が単に厳しい安全側の数値を押し付けるのではなく、人間の実際の行動特性を観察し、それに寄り添った合理的な定数を定めていることがわかります。これにより、私たちは必要以上に過大な分離距離を取らされることなく、現実的な装置レイアウトを設計することが可能になります。
2.2 到達距離 DGT と ISO 13857 の深い関係
数式のもう一つの重要な要素が、防護構造物を通しての到達距離 DGT です。これは、インターロック装置が作動して信号を出す「まさにその瞬間」に形成されている開口部寸法 e の大きさに依存します。
この DGT の具体的な数値は、ISO 13855 の中には記載されておらず、安全な距離に関する別の重要な規格である ISO 13857:2019 の「表 (Table) 4」を参照して決定することが求められます。
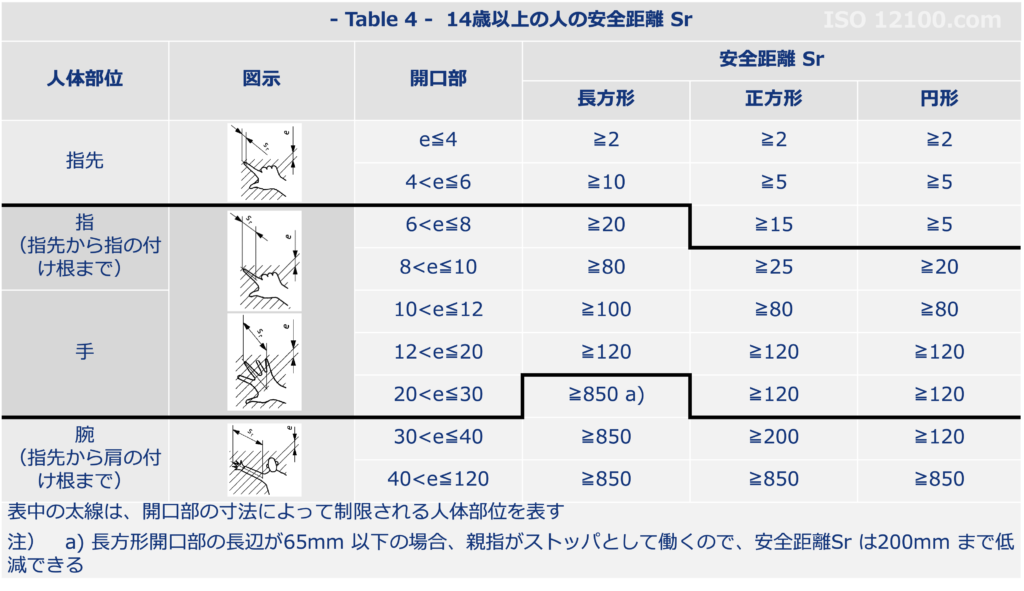
実際の現場で考えてみましょう。インターロック付ガードがわずかに開いてスイッチが反応した瞬間、そこにはスロット状(細長い長方形)の隙間ができているはずです。もしこの隙間 e が非常に小さく、指先しか入らないようなサイズ(たとえば 5mm程度)であれば、ISO 13857 に照らし合わせても、危険源までの到達距離 DGT はごくわずかな値で済みます。
しかし、もしアクチュエータの引き抜きストロークが長く、スイッチが切れるまでに 20mmや30mmの開口部ができてしまう構造だとしたらどうでしょうか。開口部が大きくなれば、指先だけでなく、手のひら、手首、さらには腕の奥深くまでが入り込むことになります。その結果、ISO 13857 から導き出される DGT の値は、非線形に跳ね上がってしまいます。
つまり、S=1600T+DGT という数式において、分離距離 S を短縮して機械をコンパクトにまとめるための最大の鍵は、「インターロックの作動点(ストローク)を可能な限り短くし、信号が出る瞬間の開口部 e を最小限に抑え込むこと」にあると言えます。これは、適切なインターロック・スイッチの選定と、扉の剛性(たわみによる隙間の拡大を防ぐ)の確保がいかに重要であるかを、数式が静かに物語っているのです。
3. 実務の落とし穴:ロータリーカム作動式スイッチの幾何学(12.2.2項)
ここからが、実務において多くの設計者が直面し、頭を抱える最も厄介な問題の一つです。ISO 13855:2024 では、12.2.2項を割いて「ロータリーカム作動式ポジションスイッチ(いわゆるヒンジスイッチ)」を適用した場合の開口部 e の算出について、非常に精緻な警告と算出方法を提示しています。
 ジュンイチロウ
ジュンイチロウ本記事は、シュメアザール株式会社のご協力のもと、同社製品をご紹介しております。


配線を扉の蝶番(ヒンジ)側に隠すことができ、デザインもすっきりするため、ヒンジスイッチは多くの設備で好んで使用されています。カタログスペックを見ると「作動角度 3度」や「5度」といった非常に小さな角度で接点が切れるように設計されており、「少しでも扉が開いたらすぐに止まるから安全だ」と直感的に考えがちです。
しかし、幾何学の現実は残酷です。ヒンジ部でわずか数度の角度が開いただけでも、テコの原理により、ヒンジから最も遠い扉の開閉端側では、驚くほど大きな開口部が形成されてしまうのです。
規格では、この開閉端における開口部 e を算出するために、以下の要素を定義しています。
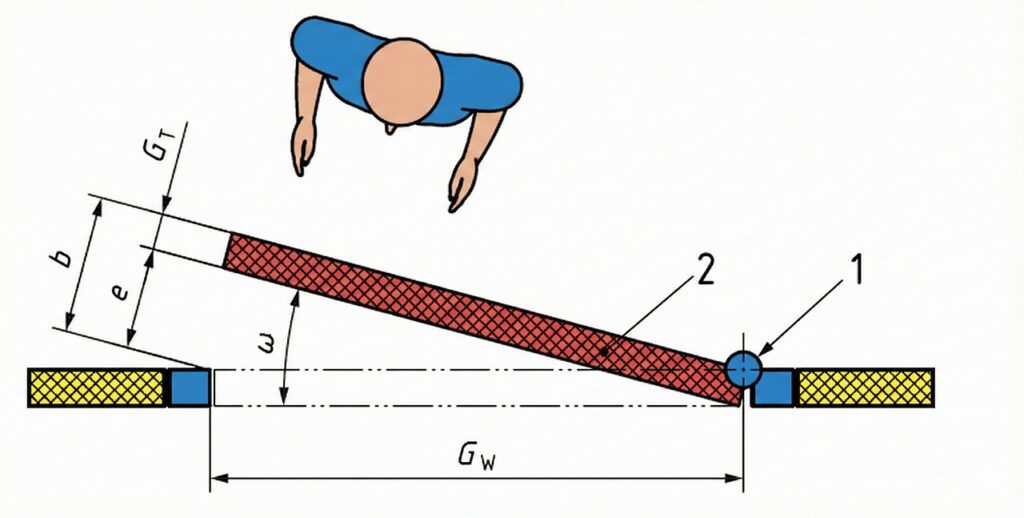
- ω:ロータリーカム作動式ポジションスイッチの作動角度(度)
- GW:インターロックガードの幅(mm)
- GT:インターロックガードの厚さ(mm)
まず、ガードの幅 GW と作動角度 ωを用いて、ヒンジから開閉端までの幾何学的な隙間の広がり b を計算します(式39)。
$$b = G_W \times \sin(\omega)$$
そして、実際の空間として空いてしまう開口部 e は、扉自身の厚み GT が物理的な障害物となる分を差し引いたものになります(式40)。
$$e = (G_W \times \sin(\omega)) – G_T$$
3.1 表5 が突きつける厳しい現実
ISO 13855:2024 には、設計者がいちいち三角関数の計算をしなくても済むように、一般的なガード幅 GW と作動角度 ωに基づく b の算出例を示した「表5」が用意されています。この表の内容を一部抜粋して説明します。これが設計にいかに重大な影響を及ぼすか、想像してみてください。
| インターロックガードの幅 GW [mm] | 作動角度 3°の場合 b | 作動角度 5°の場合 b | 作動角度 7°の場合 b | 作動角度 9°の場合 b |
| 500 | 26.2 | 43.6 | 60.9 | 78.2 |
| 800 | 41.9 | 69.7 | 97.5 | 125.1 (a) |
| 1000 | 52.3 | 87.2 | 121.9 (a) | 156.4 (a) |
| 1200 | 62.8 | 104.6 | 146.2 (a) | 187.7 (b) |
※注記
実際の開口部 e を求めるには、上記の値 b からガードの厚さ GT を引く必要があります。板金1枚のような薄い扉の場合、b の値がほぼそのまま開口部 e になります。
- (a):結果として生じる開口部 e が 120mmを超える場合、腕など身体の他の部分のアクセスが可能になります(ISO 13857参照)
- (b):結果として生じる開口部 e が 180mmを超える場合、全身のアクセス(防護空間への通り抜け)が可能になってしまいます
インターロックによる開口部 e 計算ツール
表5の開口部 b からガードの幅を差し引いた、実践的な計算ツールを作成しました。
インターロック開口部 e 自動計算ツール
式39 および 式40 に基づいて計算します。
ヒンジ式スイッチを採用することの現実
このデータが物語る真実は、設計者にとって冷や汗ものです。
たとえば、幅 1000mmの標準的な設備の観音開き扉に、作動角度 7°で設定したヒンジスイッチを取り付けたとします。扉の厚さが数ミリ程度の板金だと仮定しましょう。作業者が扉を引き、スイッチがカチッと鳴って「扉が開いた」と認識するまさにその瞬間、扉の端にはすでに約120mmもの大穴が空いているのです。
120mmの隙間があれば、作業者の腕は肩の近くまで奥深く入り込みます。その結果、ISO 13857 に基づく到達距離 DGT は 850mm(一般的な腕の長さ)という最大値を適用せざるを得なくなります。
これを先ほどの数式 S=1600T+850 に当てはめると、たとえ機械が0.5秒で停止したとしても、分離距離 S はS=1600x0.5+850=1650mm となります。扉から 1.65mも奥に危険源を配置しなければならない設備など、現実的には設計不可能です。
さらに、幅1200mmの扉で設定が甘く9°で反応するような状態になっていれば、隙間は187.7mmとなり、小柄な作業者であれば全身が防護空間の内側にスリ抜けてしまう(全身アクセス)リスクが生じます。こうなると、内側に取り残された状態での機械の不意の起動という、さらに深刻なリスクを考慮しなければならなくなります。
規格がこのように詳細な計算表を載せているのは、「ヒンジスイッチを使うな」と言いたいわけではありません。「ヒンジスイッチを使うなら、扉の幅に十分注意し、作動角度を極限まで小さく設定・維持できる堅牢な構造にしなければ、分離距離の要件を満たすことはできませんよ」という、実務に基づいた強い警告なのです。もし計算上どうしても分離距離が確保できない場合は、開閉端の側に物理的な接点を持つインターロック(トング式など)や非接触タイプのRF-ID式への設計変更が、結論となります。


4. ガードロック付きインターロック装置による解決策と分離距離(12.3項)
ヒンジスイッチの例に限らず、機械の慣性が大きく、停止信号を出してから実際に危険源が安全な状態になるまでの時間「全体システム応答時間 T」がどうしても長くなってしまう設備があります。巨大なフライホイールを持つプレス機や、高速で回転する遠心分離機などがその典型です。
このような機械にガードロックなしのインターロックを適用すると、数式の計算上、分離距離 S が何メートルにもなり、工場内に設置できなくなってしまいます。この物理的な矛盾に対する最強の解決策が、「ガードロック付きインターロック装置」の適用です。
ガードロック付きインターロックとは、機械が完全に安全な状態になるまで、ソレノイドなどの力で扉を物理的に施錠し、開けられないようにする装置のことです。「扉が開けられないのだから、開口部 e はゼロであり、分離距離もゼロで良いのではないか?」と思われるかもしれません。原則としてはその通りなのですが、ISO 13855:2024 の 12.3項では、現実的な運用や設計の都合を考慮した非常に精緻な規定が設けられています。
それは、「ロックの解除機構そのものに『遅延時間』が存在し、それが機械の停止時間よりも短い場合」の評価です。つまり、ガードロック装置の解除時間遅延 tDY が、全体システム応答時間 T よりも短い場合、機械が完全に止まりきる前に扉のロックが解除されてしまうという状況です。生産効率を高めるために、危険源から遠い位置にある扉のロックを少し早めに解除したいケースや、制御回路の制約で解除信号が先行してしまうケースなどがこれに該当します。
このような状況に対して、規格では以下の算出式(式41)を規定しています。
$$S = 1600 \times (T - t_{DY}) + D_{GT}$$
- 1600: 接近速度 K [mm/s]
- T: 全体システム応答時間 [s]
- tDY: ガードロック装置の解除時間遅延 [s]
- DGT: 防護構造物を通しての到達距離 [mm](12.2項と同様に算出)
この数式は、設計者に柔軟な選択肢を与える非常に合理的なアプローチです。
もし、ロック解除の遅延時間 tDY が機械の停止時間 T と完全に一致、あるいはそれ以上に設定されていれば、T - tDY の部分はゼロ以下となります。この場合、時間的な要素は消え去り、分離距離 S は単にガードがわずかにガタつくことで生じる隙間からの到達距離 DGT のみを考慮すればよくなります。事実、本規格の附属書 F.4においても、時間遅延機能を利用してガードロックを解除する場合、その解除の遅延時間 tDY は、全体システム応答時間 T を用いて決定すべきであると強く推奨されています。
一方で、どうしてもロックを早めに解除したい場合(たとえば全体システム応答時間 T が3秒で、tDYを 2秒に設定したい場合)、ロックが解除されてから機械が止まるまでの「残り1秒間」が存在します。この数式を使えば、その残り時間に対してのみ、作業者が 1600mm/sの速度で扉を開けて接近してくるリスクを評価し、分離距離として加算すればよいことになります。
単に「完全に止まるまで開けてはならない」と縛るのではなく、「止まる前に開けるなら、その時間差の分だけ危険源を奥に配置しなさい」とトレードオフを許容してくれているのです。この数式を用いることで、作業者が扉を開けて危険源に到達するまでの時間と、機械の残存停止時間を正確に比較し、必要十分な分離距離を算出することが可能になります。安全性と生産性のバランスに悩む設計者にとって、規格が提示するこの数式は強力な味方となるでしょう。
5. 附属書F(Annex F)が教える「全体システム応答時間 T」の真実
これまでの数式において中心的な役割を果たしている変数「T 全体システム応答時間」について、その内訳を正しく理解することは、分離距離の最適化において不可欠です。ただ漠然と「機械が止まるまでの時間」と捉えていると、思わぬ落とし穴にハマることがあります。
ISO 13855:2024 の 附属書Fでは、意図するリスク低減を達成するための全体システム応答時間 T の構成要素が詳細に定義されています。全体システム応答時間 T とは、安全機能の入力(インターロックが開いたなど)が作動してから、意図するリスク低減が完全に達成される(危険源が安全な状態になる)までの「すべての時間遅延の合算」です。
附属書Fに従うと、この T は主に以下の要素を足し合わせたものとして規定されています。
- tI: 入力デバイスの応答時間インターロック・スイッチ自体が「扉が開いた」ことを検知し、信号を出力するまでの時間です。直列に接続された複数のデバイスがある場合は、それらの合算となります。
- tL: SRP/CSのロジック応答時間セーフティPLCやセーフティリレーモジュールなどが、入力信号を受け取ってから出力信号をオフにするまでの演算・処理時間
- tO: SRP/CS 出力の応答時間最終的な出力機器(コンタクタなど)がオフになるまでの時間
- tME: 機械の応答時間。ここが実務上、最も見積もりが難しく、かつ支配的な時間となります。附属書 F.2.4 では、機械の駆動構造に応じた考慮事項が示されています。たとえば、クラッチ駆動の場合はクラッチが切れてブレーキが作動し止まるまでの時間、モータ直駆の場合はインバータ等によるダイナミックブレーキの停止時間、そして空圧・油圧バルブで制御されている場合は、バルブの排気抵抗やスプールの動作遅れまでを含める必要があります。
- tF: 機械の許容要因(マージン)に関連する時間機械は使えば使うほどブレーキパッドが摩耗し、停止時間は延びていきます。また、金型などの工具重量の変動、温度変化による影響なども停止時間に変化を与えます。附属書F.2.5 では、こうした経年劣化や環境変化を見越したマージン tF を加味することが求められています。
5.1 実機での測定(F.3項)のポイント
カタログスペックだけでは tME の正確な計算が困難な場合、附属書 F.3 では専用機器による実機での計測が言及されています。実際の設計・評価現場では、プランジャーやフラグ付きのストップタイム測定器を使って、システムが停止に至るまでの時間を実測します。この際、ワーストケース(最高速度、最大負荷など)の条件下で複数回(通常は最低10回)の測定を行い、その最大値を用いるか、統計的なマージンを加えるといった現実的なアプローチを取ることが重要です。
5.2 自動ドア(動力駆動式ガード)を味方につける開放時間 t3(F.2.1.2項)
ここで、実務的に非常に有益なもう一つの洞察をご紹介します。CNC工作機械や自動搬送設備のセルなどで多用される「動力駆動式ガード(自動ドアや高速シートシャッターなど)」を使用している場合、附属書 F.2.1.2項の規定が設計を大いに助けてくれる可能性があります。
自動ドアは、開指令が出たからといって、瞬間移動して全開になるわけではありません。身体の一部(手や腕)が入り込めるだけの開口部寸法 e に達するまでに、物理的な移動時間を要します。規格では、この「動力駆動式ガードの開放に関連する時間 t3」を用いて、全体システム応答時間 T の影響を相殺(分離距離を短縮)することが認められています。
この開放時間 t3 は、計算またはテストによって決定され、計算式(式F.2)は以下のようになります。
$$t_3 = \frac{e}{v_G}$$
- e: 開口部のサイズ [mm]
- vG: 動力駆動式ガードの開放動作の速度 [mm/s]
この数式が意味しているのは、「ドアが開くスピードが遅ければ遅いほど、人間が危険源にアクセス可能になるまでの時間が稼げるため、その分だけ機械の停止時間が長くても許容される(あるいは分離距離を短くできる)」ということです。
設計の観点から見れば、重量物のブレーキ性能を物理的な限界以上に引き上げることは非常に困難であり、大容量のブレーキユニットはコストもかさみます。しかし、自動ドアのモータ制御プログラムを調整し、開閉プロファイル(特に開き始めの初速 vG を意図的に少し遅く設定することで、分離距離 S の要件をクリアし、高価なガードロック装置への変更や設備レイアウトの拡大を回避できる可能性があるのです。
これは、安全規格が単なる「べからず集(制約)」ではなく、システム全体を俯瞰して設計の自由度を拡張するための「論理的なツール」として機能する素晴らしい例だと言えるでしょう。
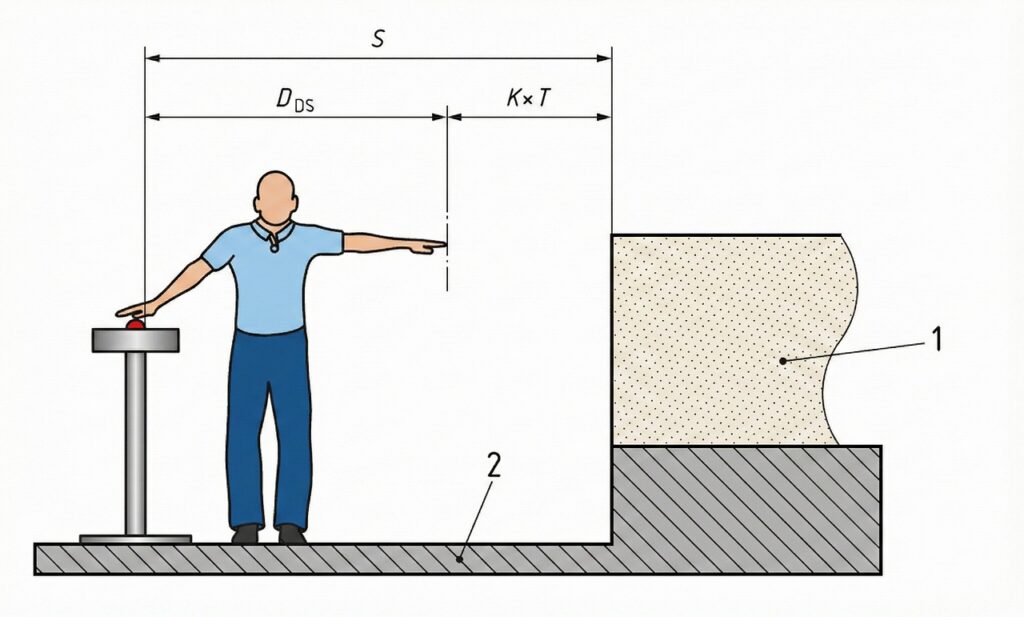
6. 両手押しボタンの分離距離
プレス機などの危険な作業において、作業者の両手を機械の外部に拘束して安全を確保する「両手操作制御装置(いわゆる両手押しボタン)」。非常にポピュラーな安全対策ですが、ボタンから手を離した瞬間に機械が完全に停止するわけではありません。手を離してから惰性で動いている危険源に手が届かないようにするため、ISO 13855:2024 の第10章で具体的な分離距離の算出方法が規定されています。
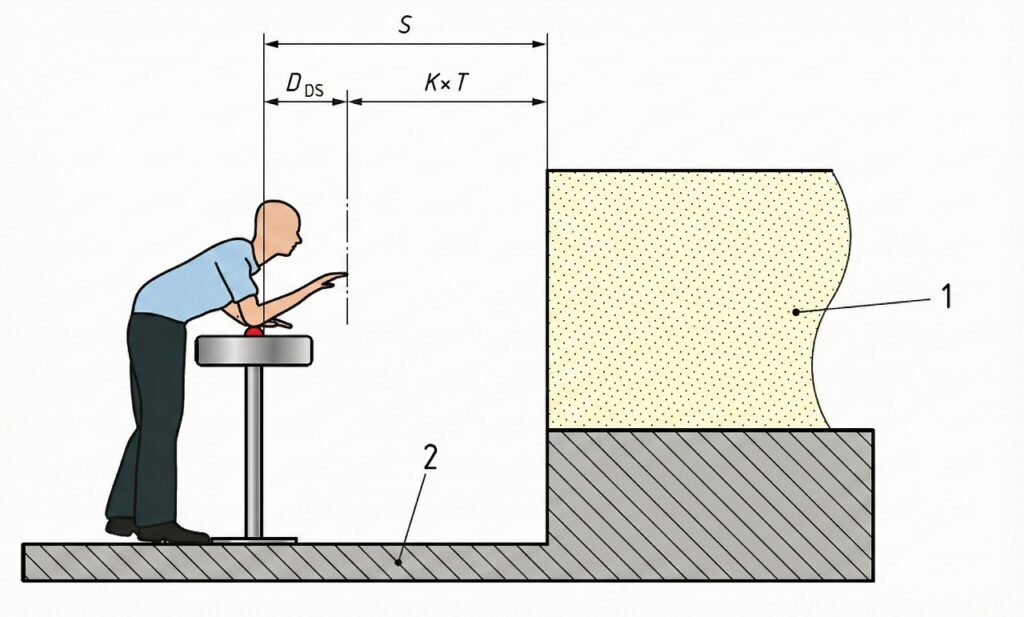
6.1 基本の計算式と「550 mm」の意味(10.1項)
ボタンの押し込みが「手や腕の侵入(encroachment)を防止しない構造」の場合、10.1項に従い、以下の数式(式33)が適用されます 。
$$S = (1600 \times T) + 550$$
ここでの接近速度 K は 1600mm/s が適用されています 。そして注目すべきは、保護装置による到達距離 DDS として加えられている「550mm」という数値です。
なぜ 550mmなのでしょうか?
皆様も現場で、両手操作ボタンを「片手と片肘」や「両肘」を使って無理やり押し、空いた手で製品を直そうとするような「作業の横着(不適切な操作)」を見たことがないでしょうか。規格の附属書G(Annex G.4)および ISO 13851 によれば、この 550mm は、まさにそのような不正操作をした際の「肘から指先までの距離(前腕の長さ)」を想定したものです。
現場で起こりうる予見可能な誤使用をシステム側で安全にカバーするための、非常に現実的かつ人間工学的な数値だと言えます。
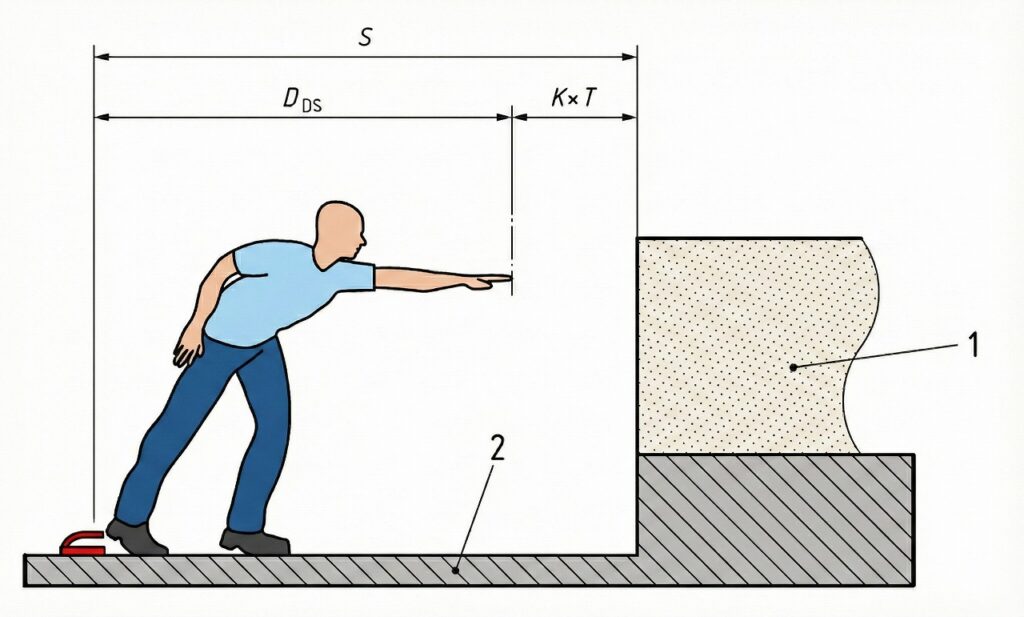
6.2 侵入を防止する構造(シュラウド等)による距離の短縮(10.2項)
一方、10.2項では、設計上の工夫によって分離距離を劇的に短縮できるルールが示されています。
ボタンの周囲に適切なカバー(シュラウドやカラー)を設けたり、操作盤の向きや配置を工夫したりすることで、肘や前腕による不正操作や、操作中の手が危険源に向かって侵入するリスクを「完全に排除」できる場合です。
この条件を満たせば、到達距離 DDS を「0mm」とすることが規格で認められています。つまり、数式は以下のようになります。
$$S = 1600 \times T$$
操作ボタンのカバーを適切に設計(ISO 13851準拠)するだけで、装置全体の奥行き(分離距離)から 550mm もコンパクトにできるというのは、装置の省スペース化を迫られる設計者にとって見逃せない大きなメリットとなります。

7. 単一制御デバイスの分離距離
設計実務において、インターロック付ガードと並んでよく使用されるのが、作業者の手や足による操作を前提とした「単一制御デバイス」です。ISO 13855:2024 の第11章では、この単一制御デバイス(片手用の押しボタンや、フットペダルなどのホールド・トゥ・ラン制御器)の分離距離について、非常に厳しい要件を定めています。
単一制御デバイスは、あくまで「操作している作業者自身の安全」を確保するためのものです。規格では、手操作(Hand-operated single control devices)の場合の分離距離 S を以下の数式(式34)で規定しています。
$$S = (1600 \times T) + 2200$$
また、足操作(Foot-operated single control devices)の場合の分離距離 S は、以下の数式(式35)で規定されています。
$$S = (1600 \times T) + 2500$$
なぜ追加の到達距離 DDS として、2200mmや2500mmといった非常に大きな値が設定されているのでしょうか?
皆様も現場で実際にペダルを踏んだり、片手でボタンを押したりする姿勢を想像してみてください。片足や片手がデバイスに拘束されていても、もう一方の自由な手や上半身全体を使えば、危険源に向かって奥深くまで手を伸ばすことができてしまいます。
規格は、この人間の身体的自由度を厳格に評価し、意図せず機械に触れてしまうリスクを防ぐための安全な距離を確保するように求めているのです。もし工場のレイアウト上、危険源から 2.2mや2.5mも離れた場所に操作盤やペダルを設置することが難しい場合は、インターロック付ガードで危険源を物理的に覆うか、両手が拘束される両手操作制御装置への変更を検討する必要があります。



 中の人
中の人ゴムゴムの実は食べないでください!
7. おわりに インターロック付ガードで大切にしたい視点
本記事の前半となる第2章から第4章にかけては、第12章におけるガードロックの有無や、ヒンジスイッチの幾何学的な分離距離の算出について詳しく見てきました。
最後に、12章の冒頭にある12.1項 Generalで語られている内容について補足します。ここは、インターロック付ガードを設計する上で絶対に忘れてはならない「構造的な本質」に関わる部分です。
12.1項では、インターロック装置が停止信号などの安全機能を開始する前に、ガードが部分的に開いてしまうことについて強い注意を促しています。具体的には、次のような要因によって、私たちが想定している以上の開口部 e が生じる可能性が予見されると指摘されています。
 中の人
中の人取り除くことができない残留リスクがあるということです!
- インターロック装置の設計上の遊びであるヒステリシス
操作キーなどのアクチュエータが引き抜かれ始めてから、実際に接点が切り替わるまでには移動距離が存在します - アクチュエータの取り付け位置と調整
扉のどの位置にスイッチを取り付けるかによって、機械的なズレの影響が生じます - 柔軟な要素の影響
チェーンやケーブルなどでガードを固定している特殊な構造の場合、それらのたわみによって、停止信号が出る前にガード全体が大きく開いてしまう現象です
つまり、「カチッ」とスイッチが反応するまさにその瞬間に、扉にはどれだけの隙間ができているのか。これを正確に見極めることが、第12章を適用する上でのすべての出発点となります。設計の現場では、単にカタログの数値を数式に当てはめるだけでは不十分かもしれません。実際の扉の剛性やガタつき、そして長年の使用によるヒンジの摩耗などを想像し、最悪のケースを想定して分離距離を確保していく姿勢が求められます。
ここまで「静的分離距離」「動的分離距離」「動的分離距離 自動計算ツール」そして本記事をお読みいただき、ありがとうございました。皆様の設備設計において、本記事が少しでも論理的で安全な機械づくりのヒントになれば幸いです。