機械安全設計の実務において、安全防護物の適切な配置は、リスク低減方策の有効性を左右する最重要項目の一つです。
 ジュンイチロウ
ジュンイチロウライトカーテンを危険源からどの程度離すべきか、迷うことはありませんか?
本ブログでは、人体部位のアプローチ速度に基づき、安全防護物の位置決めと寸法決定の要求事項を規定する国際規格 ISO 13855:2024 について解説します。
本規格は、機械の危険源に対し、人体が到達する前に機械系が安全な状態へ移行するために必要な「分離距離 SSeparation Distance」の算出根拠となるものです。設計者は、本規格の適用範囲および除外事項を正確に把握した上で、適切な防護方策を講じる必要があります。
また、従来の規格 (ISO 13855:2010) では、「追加距離 C」という包括的な項で処理されていた侵入検知の不確実性が、2024年版では「検出システムに関連する距離 DDS 」として再構築され、その構成要素として「上方からの到達 DDO」、「隙間を通り抜ける DDT」、そして新たに法制化された「下方からの潜り込み DDU」が明示的に組み込まれました。
$$S=(K \times T)+D_{DS} +Z$$
ISO 13855:2024 の適用範囲と技術的要件
ISO 13855:2024 が規定する以下の防護方策および制御機器の位置決めについて説明します。
 中の人
中の人以下、ISO 13855:2024 を ISO 13855 と表現しますね!
対象となる安全防護物および安全制御機器
ISO 13855 は、以下のデバイスを配置する際の位置および寸法要件を規定しています。
- 電気的検知保護装置(ESPE)
- 能動的光電保護機器(AOPD):ライトカーテン等
- 拡散反射形AOPD(AOPDDR):レーザースキャナ等(2D/3D)
- 視覚ベース保護機器(VBPD):参照パターン技術(VBPDPP)およびステレオビジョン技術(VBPDST)を用いたもの
- 感圧機器:感圧マットおよび感圧フロア
- 制御機器:両手操作ボタン、イネーブリングスイッチ
- ガード:インターロック付きガード
安全関連手動制御機器 SRMCD の配置
2024年の改訂における重要なポイントとして、防護空間内部における安全関連手動制御機器 SRMCD の配置要件が含まれます。防護空間内からリセットボタン等へアクセスする際の寸法決定においても、本規格の要求事項が適用されます。
ISO 13855 の適用除外事項
なお、リスクアセスメントにおいては、ISO 13855 が以下の条件を考慮していない点に留意する必要があります。
- アプローチ速度の前提:走る、跳躍する、落下するといった動作は考慮されていません(通常の歩行および上肢動作を前提)。
- 可搬式装置:工具なしで移動可能なペンダント式制御装置等。
- その他のハザード:放出物(放射線、熱、騒音、ガス等)や、機械部品の破損・落下に起因するリスク。
- 存在検知のみの用途:起動のインターロックのみに使用され、停止機能を持たない(安全距離を必要としない)場合。
第3章:用語と定義の説明
規格を正しく理解するための第一歩は、そこで使われている言葉の厳密な定義を知ることです。計算式で使われる記号の一つひとつには、設計者が考慮すべき深い意味が込められています。ここではISO 13855:2024 で定義されている重要な用語について、記号の意味も含めて詳しく解説していきます。
基礎となる用語と記号
システム全体の応答時間 T
これは安全距離計算において最も核となる要素の一つです。記号 T で表されるこの時間は、保護設備が機能を作動させてから、機械が意図したリスク低減を達成するまでの時間間隔を指します。
具体的には、ライトカーテンが遮光された瞬間から、危険な動きが完全に停止するか、あるいは安全な速度に減速されるまでの時間です。ここで先生が強調しておきたいのは、この時間には測定の不確かさや、ブレーキの摩耗といった経年劣化、摩擦の変化などの環境要因による遅れといった許容差要因も含めなければならないという点です。単なる停止時間ではなく、最悪のケースを想定した時間と捉える必要があります。
応答時間 tx
システム全体ではなく、個々のデバイス単体の反応時間を指します。記号では tx などが使われます。これは保護設備を作動させる事象が発生してから、そのデバイスが出力信号をオフにするなどの意図した状態になるまでの最大時間のことです。ここでもやはり、測定の不確かさなどの許容差を含めることが求められます。
検出能力 d
保護設備が特定の検出ゾーン内で検出できるテストピースすなわち試験片の能力のことです。記号dで表されます。センサーがどれくらい小さな物体を見つけられるかという性能を示しており、この数値が小さいほど高感度であると言えます。
有効検出能力 de
こちらは d と似ていますが、実運用上の設定値という意味合いが強くなります。記号は de です。デバイスのインテグレーターすなわちシステムを組む人が設定するパラメータの限界値で、保護設備の作動を引き起こす値です。例えばフローティングブランキング機能などを使用する場合、物理的な検出能力 d よりも大きな物体でないと検知しない設定になることがあり、その場合の能力値がこれに当たります。
感応式保護設備 ESPE
英語のElectro-Sensitive Protective Equipment の頭文字をとったもので、ESPE と表されます。ライトカーテンやレーザースキャナなどのように、電気的に人の存在や侵入を検知する装置の総称です。最低限の構成として、検知デバイス、制御監視デバイス、そして出力信号切替デバイスが含まれるものを指します。
分離距離 S Separation distance
今回のブログの主役となる用語です。S Separation distance で表されます。保護設備が作動する位置と、危険源との間に確保しなければならない最小の距離のことです。機械が停止する前に人体が危険源に到達してしまうのを防ぐために必要な距離であり、以前は最小距離と呼ばれていました。重要な点は、人が検出ゾーンをどこから通過するかに関わらず、検出ゾーンと危険源との間の最短距離として定義されることです。
保護装置に関連する到達距離 DDS
保護装置が作動する前に、人体の一部が検出ゾーンを通過して危険源や安全関連の手動制御デバイスに向かってどれだけ進むことができるかという距離です。 DDS と表します。例えばライトカーテンの光軸の間から指先が少し入ってしまう距離や、保護設備が反応するまでのわずかな時間の間に体が進んでしまう距離がこれに該当します。以前は侵入距離と呼ばれていました。
基準面
分離距離を測る際の高さの基準となる面のことです。通常は機械の使用中や危険源へのアクセス時に人が立っているレベルを指します。注意が必要なのは、基準面は必ずしも地面や床とは限らないという点です。作業台の上で作業する場合などは、その作業台の上面が基準面となります。
安全関連手動制御機器 SRMCD
今回の改訂で非常に重要視されている用語で、SRMCD と表します。これは意図的な人間の操作を必要とし、その操作がリスクの即時的な増加をもたらす可能性が予見される制御機器を指します。
機械の起動やリセット、あるいは寸動運転などのホールド・トゥ・ラン制御には、押しボタンやフットペダルなどが用いられます。これらは「安全関連手動制御機器 SRMCD」と呼ばれ、人の意図的な操作を必要とする点が特徴です。操作直後に危険な状態になる可能性が予見されるため、適切な選定と配置が求められます。
速度・分離監視 SSC
英語のSpeed and separation control の略で、SSC と表します。人体の一部が検出された位置に対して、機械の速度や軌道を変更することで分離距離を維持し、意図したリスク低減を達成する安全機能です。協働ロボットなどで、人が近づくとゆっくり動いたり止まったりする機能がこれに当たります。
第4章:保護設備配置の方法論とプロセス
用語の定義を頭に入れたところで、次は実際に保護設備を配置するための具体的な手順について解説します。この章は計算に入る前の全体設計図とも言える部分であり、正しい手順を踏むことが安全な機械を作るための近道となります。
全体的な流れとステップ
保護設備の配置における大原則は、意図したリスク低減を達成するために、危険源へのアクセスが間に合うように検出されることです。もし一つの保護設備を使用する機械に二つ以上の危険源がある場合は、それぞれの危険源に対して分離距離を計算し、最も厳しい条件すなわち最も距離が必要な条件を採用する必要があります。
ISO 13855 では保護装置の配置決定プロセスを以下のようなステップで示しています。
保護設備の適切性確認
リスクアセスメントの結果に基づき、選択した保護設備がその危険源に対して適切かを確認します。
- 確認範囲: 危険源へのアクセス検知に加え、防護空間内からリセットボタン等のSRMCD へ手を伸ばす行為の検知も意図されているか確認してください。
個別規格(タイプC規格)の確認
その機械に適用されるタイプC規格(個別製品規格)の有無を確認します。
- 規格がある場合: 具体的な距離規定があれば、それに従います。
- 規格がない場合: (またはタイプC規格がISO 13855を参照している場合のみ)、この規格の計算式を使用します。
前提条件の適合確認
対象の機械や環境が、この規格の想定する前提条件に合致しているかを確認します。
危険源の特定
保護設備に関連するすべての危険源を洗い出し、特定します。
分離距離の算出と決定
計算式に基づき、検出ゾーンと危険源との分離距離を決定します。
- 決定基準: 算出された距離の中で最も大きい値を採用します。
- 迂回可能性の考慮: 乗り越え、通り抜け、回り込み、下をくぐる等の行為が可能かも考慮に入れます。
全身侵入の可能性判断
人が防護空間の中に完全に身体を入れてしまう「全身侵入」が可能か判断します。
- 可能な場合: 人が内部にいる状態で機械が予期せず再起動しないよう、追加の防止措置(ロックアウト等)が必要です。
リスクを伴うSRMCD の特定
全身侵入の検知を行わない場合、SRMCD の配置を確認します。
- 対象: リセットボタン、起動ボタン、イネーブリングスイッチなど。
- 確認事項: 保護設備エリアの内部、または保護設備越しに手が届く範囲にこれらが配置されていないか特定します。
SRMCD への到達防止距離の決定
特定したSRMCD に対し、保護設備(ライトカーテン等)から手が届かない距離を計算します。
- 計算のポイント: SRMCD 自体を「危険源」とみなして計算します。
- 対策: 乗り越えや隙間からの侵入でも指が触れない位置にボタンを配置するか、保護設備自体を遠ざける必要があります。
実現可能性の最終確認
算出した「分離距離」や「到達防止距離」が、実際の機械設計で実現可能か判断します。
- 問題がある場合: 距離が長すぎて機械が巨大化する等の場合は、設計変更や保護設備の再選定(応答速度の速い機器への変更など)を行ってください。
静的および動的な分離距離
機械の状況に応じて、分離距離の考え方は二つのシナリオに分かれます。
静的分離距離
これは危険源の位置が固定されている場合を指します。例えばプレスの金型のように危険なゾーンが決まった場所に存在する場合、その最大境界までの距離を計算します。
動的分離距離
こちらは危険源の位置が移動する場合です。移動ロボットや無人搬送車のように機械自体が動くことで危険源も移動する場合、システムが停止するまでの応答時間 T の間に危険源がどれだけ移動してくるかを考慮する必要があります。
基準面の決定と段差の扱い
安全対策、特に安全距離の計算などを検討するうえでは、「基準面」を正しく設定することが非常に重要です。基準面は通常、人が作業場所で床面上を平面的に移動しながら機械へアプローチするという、一般的なアプローチ方法を前提として考えられています。
しかし、実際の機械の作業現場では、作業のためにステップを上り下りする必要があったり、機械の設計上、ハザードゾーンやSRMCD へアクセスする際に作業台や機械のフレームに乗って立ち位置の高さを変えられたりするなど、人の高さが変わる状況がしばしば発生します。こうした高さの変更が起こり得る場合には、安全距離を適切に検討するために、人が実際にアクセスに使用しているレベル、つまり足場としている面の高さを「基準面」として捉え、その前提で評価を行う必要があります。
例えばステップを上る場合を考えてみましょう。もし検出ゾーンの手前に高さ1000mm 未満のステップがあり、そのステップの幅が50mm 以上ある場合は人が乗れるとみなされ、そのステップの上面が新たな基準面となり得ます。そこから危険源への距離を測る必要が出てくるのです。
逆にステップを下りる場合でも、検出ゾーンの先に低い面があり、そこへ降りて危険源に近づく可能性が予見されるなら、その低い面を基準面として考慮する必要があります。基準面とは人が通常立つ可能性が予見される面であり、必ずしも工場の床面だけではないことを常に意識してください。
ステップUP -1-
ステップUP -2-
ステップDOWN -3-
ステップDOWN -4-
重要な前提条件
この規格の計算式はいくつかの前提条件に基づいています。これらの条件から外れる場合は、規格の数値をそのまま適用することはできません。
まず、人が頭や足を保護設備の上や下に無理やり突っ込んで危険源に到達しようとするような極端なケースは想定していません。また、14歳以上の人体寸法データを使用しているため、子供を対象とした規格ではないことにも注意が必要です。
子供がアクセスする可能性が予見される環境では、設計者が独自に距離を計算する必要があります。さらに、アプリケーションにおいて最大の有効検出能力 de を使用して計算すること、保護設備と危険源の位置関係は維持されること、人は何らかの形で基準面に接していること、梯子や椅子などの補助具を使わないこと、棒や道具を使ってリーチを伸ばす行為は考慮していないことなどが前提となります。
全身侵入に関する特定要件
この項目は、人が危険ゾーンへ全身でアプローチするのを防ぐために使用するESPE(ライトカーテンなど)に関する要求事項です。ESPE を全身侵入の検知のみに使用する場合の要件として、以下の要求を満たさなければなりません。
-
- 開口部の高さが500mm 以下の場合に限り使用できる。
- 基準面から200mm の高さに設置する必要がある。
- 一般事項
-
- 検出ゾーンの下端の高さ HDB は、原則として基準面から200mm 以下とする。
- 産業環境では、リスクアセスメントの結果に基づき最大300mm まで許容される場合がある。
- 基準面に対して垂直に設置される場合
-
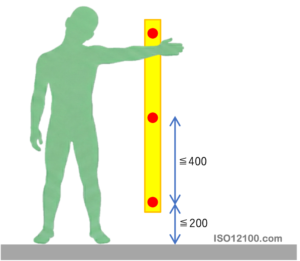
- 検出ゾーンの上端の高さ HDT は900mm 以上とする(シングルビーム、平行設置の場合を除く)
- ビーム間隔は400mm 以下とする。
- 例外的な場合には、500mm まで許容されることがある。
- シングルビームの場合
検出ゾーンの下端の高さ HDB は基準面から200mm 以下でなければなりません。これは下を這って通り抜けるのを防ぐためです。ただし産業環境においてはリスクアセスメントの結果次第で300mm まで許容される場合があります。また、またいで通り抜けるのを防ぐため、検出ゾーンの上端の高さ HDT は900mm 以上でなければなりません。
SRMCD への到達距離
今回の改訂で重要視されているのが、防護空間内にあるリセットボタンなどのSRMCD への到達です。防護空間の中からこれらのボタンを押せてしまうと、中に人がいる状態で再起動がかかるリスクがあります。そのため、SRMCD の操作が危害をもたらす可能性がある場合、そのデバイスは防護空間内から人が操作できないような位置や向きに設置しなければなりません。計算においては、危険源の位置をSRMCD の位置に置き換えて同様の到達距離の計算を適用します。
第5章:分離距離の計算式「S」の詳細解説
ここからは具体的な計算の方法に入ります。危険源から保護設備をどれだけ離すべきかを決定するための基本公式と、その構成要素について詳細に学びます。この式は安全設計において最も重要な数式と言えます。
分離距離 S の基本公式
分離距離 S を求めるための基本公式は以下の通りです。この式は、人が危険源に到達する前に、機械が安全に停止するために必要な距離を求めています。この計算式は、基本的に「人が危険源に到達するまでに移動する距離」に、保護装置やその他の要因による安全距離を加えることで、必要な分離距離 S を求めています。
分離距離 S =(人の移動速度×機械の停止にかかる時間)+保護装置による追加距離+その他の安全距離
この計算により、機械の危険な動きが完全に停止するまで、作業者が危険ゾーンに到達しないように距離を確保します。
$$S = (K × T) + D_{DS} + Z$$
- S: 分離距離 (mm)
- 危険源と人体の間に確保すべき最小距離
- K: アプローチ速度 (mm/s)
- 人体またはその部分が危険源へアプローチする速度
- T: システム応答時間 (s)
- 安全システムが危険を検知し、機械が停止するまでの合計時間
- DDS: 保護装置による到達距離 (mm)
- ガードやライトカーテンなど、保護装置によって考慮が必要な追加距離
- Z: 補足的な距離要素 (mm)
- 用途や状況に応じて加える安全のための追加距離(例:測定誤差など)
DDS はミリメートル単位の保護設備に関連する到達距離です。検知される前に体がどれだけ危険源側に突き出てしまうかを表す距離です。 Z はミリメートル単位のアプリケーションに依存するの補足的な距離要素です。測定誤差などの余裕分です。
アプローチ速度 K の設定
アプローチ速度 K には、長年の経験とデータに基づき二つの値K=2000mm/s およびK=1600mm/s が定められています。
K=2000mm/s
これは手や腕の動きを伴うアプローチの場合に使用します。ハンドスピードとも呼ばれ、上肢の水平方向の動きを想定しています。
K=1600 mm/s
これは歩行によるアプローチの場合に使用します。歩行のスピードです。基本的には、手だけで届く範囲の計算には2000mm/s を、歩いて近づく必要がある距離の計算には1600mm/s を使用します。
もし危険源自体が移動する場合、例えば自律走行搬送ロボットなどの場合は、人のアプローチ速度だけでなく機械が人に向かってくる速度も考慮しなければなりません。人と機械が互いに近づき合う場合、相対速度は大きくなります。この場合、両者の合算されたアプローチ速度を考慮する必要があります。
システム全体の応答時間 T の算出
システム全体の応答時間 T は、計算によって求めるか、実測によって求めることができます。
計算による場合、以下の要素の合計以上である必要があります。
$$T \geq {t_{SRP/CS}} + t_{ME} + t_F$$
- T:安全距離の計算に使用される総合システム応答時間
- tSRP/CS:安全関連部または安全制御システムの応答時間
- これは、保護方策のメーカーおよび安全関連部または安全制御システムの関連部分からの最悪ケースの仮定を合計して決定されます。
- tME:機械の応答時間
- これは、機械メーカーが設計中に推定し、不確かさを含みます。
- tF:機械の許容誤差に関連する時間
- これは通常、測定値 Tm に基づいて決定され、工具の重量、温度、コンポーネントの経年劣化、および最悪ケースのシナリオ(例:可動部の最大速度)などの様々な要因を考慮して決定されます。
わかりやすく言うと、tME は機械自体の応答時間であり、停止信号を受けてからブレーキが効いて実際に危険な動きが止まるまでの時間です。 tF は機械の許容差要因に関連する時間です。ブレーキパッドの摩耗や温度変化などにより停止時間は常に一定ではないため、そのばらつきを考慮した余裕時間が必要です。
これらをより詳細に分解すると、T は以下の要素の和として表されます。
$$T \geq t_I+t_L+t_O+t_D+t_R+t_M+t_F$$
- T:安全距離の計算に使用される総合システム応答時間
- tI:入力(センサー、保護機器など)の応答時間
- tL:安全関連部または安全制御システムのロジックの応答時間
- tO:安全関連部または安全制御システムの出力の応答時間
- tD:エネルギー源の消散に関連する応答時間
- tR:機械的な応答に関連する応答時間
- tM:機械的な慣性に関連する応答時間
- tF:機械の許容誤差に関連する時間
これらを個別に正確に見積もることが難しい場合は、実測値 Tm を使用します。その場合でも、測定誤差やばらつきを考慮した許容差 tF を加算します。
$$T \geq T_m+t_F$$
中の人以下のような安全関連回路がある場合は、すべての動作時間を足し合わせるということです!

保護装置に関連する到達距離 DDS
保護装置は人体が検出ゾーンに触れた瞬間に作動するわけではありません。例えばライトカーテンの場合、光軸と光軸の間には隙間があり、指先などはある程度奥まで入ってから検知されます。この検知されるまでに進んでしまう距離や、保護装置を迂回して手が届く距離を考慮するのが DDS です。
保護装置の検出ゾーンを乗り越えたり横から回り込んだりして危険源に到達できる場合、その迂回による到達を防ぐための距離も考慮しなければなりません。この場合、計算された分離距離に加えてISO 13857 に基づく到達可能性の評価を行い、最も安全側の数値を採用します。
補足的な距離要素 Z
分離距離を決定する際、機械の停止時間や人の侵入速度といった基本的な要素に加え、測定誤差や環境要因による「不確かさ」をカバーするために補足的な距離要素 Z を加算する必要があります。
なぜ「補足的な距離要素」が必要か?
標準的な計算だけでは安全が担保できないケースがあるため、以下の理由により追加の距離が必要となります。
- 個別事情への対応: 機械の種類、用途、設置されている安全防護策の特性による影響。
- 不確かさの吸収: 予期せぬ状況や、測定システム自体の誤差を考慮し、より確実な安全距離を確保するため。
 中の人
中の人注意: これらの要素を決定する際は、必ず製造者(安全防護策メーカー、機械メーカー、またはシステムインテグレーター)が提供する取扱説明書に従ってください。
考慮される補足的な距離要素
考慮される補足的な距離要素には、以下のものが含まれます(ただし、これらに限定されません)。
- ZG : 一般的な装置測定誤差の補足
- 例:測定装置自体の精度に起因する誤差を補うための要素
- ZM : 機械の位置不確かさの補足
- 機械の位置測定システムの精度によって生じる、機械の正確な位置の不確かさに対する補足
- ZP : 人の位置不確かさの補足
- ESPE の精度によって生じる、人の正確な位置の不確かさに対する補足
- ZR = 反射に基づく測定誤差の補足
- SPEの近くに再帰反射体がある場合などに、反射によって測定に誤差が生じる可能性に対する補足
- ZF = 移動機械の最低地上高不足の補足
- 車両などの移動機械において、通常、ESPE は足より上の部分を検出するため、検出点より前に足がある可能性が予見されます。
- 機械の制動プロセスが足の長さを考慮できない場合や、機械に最低地上高がない場合に足が負傷する可能性が予見されるため、この補足が必要となります。
- ZB = 移動機械の制動トルク低下の補足
- 車両などの移動機械において、製造者から提供される情報に基づき、制動トルクの低下を考慮するための補足
計算式への反映
これらの適用可能な補足的な距離要素を、全体システム応答時間に基づく分離距離計算式に加算することで、分離距離 S を計算するための式は以下のようになります
$$S=(K×T)+D_{DS}+(Z_G+Z_R+Z_F+Z_B+… )$$
- S: 最小分離距離
- K: 人体速度
- T: 全体システム応答時間
- DDS: 追加の到達距離
- ZG , ZR , ZF , ZB , …: 各補足的な距離要素
最後にアプリケーションや機器の特性に応じた追加距離 Z を加算します。これにはデバイスの測定誤差一般に対する追加距離 ZG 、機械の位置測定の不確かさに対する追加距離 ZM、ESPE による人の位置検知精度の不確かさに対する追加距離 ZP、反射による測定誤差に対する追加距離 ZR などが含まれます。
特にAGV やAMR など移動機械においては、最低地上高不足に対する追加距離 ZF が重要です。通常、足首より上を検知するため、足先が機械の下に入り込んでしまうリスクを考慮する必要があります。また、ブレーキトルクの低下に対する追加距離 ZB も考慮します。
第7章:アプローチ方向の分類
分離距離を正しく計算するためには、人が検出ゾーンに対してどのような角度で近づいてくるかを正しく分類する必要があります。 ISO 13855 では検出ゾーンへのアプローチを直行アプローチと並行アプローチの二つに大別しています。
直交アプローチ
人体のアプローチ方向が、検出面の法線に対して±30°以内である場合、これを「直交アプローチ」とみなします。これは、人体がセンサーに対してほぼ正面から突っ込んでくる状態を指します。この範囲内であれば、人体の投影面積が最大となり、かつセンサーを通過する速度が最も速くなるリスクシナリオであるため、次章で解説する第8章の規定が適用されます。
直行アプローチと平行アプローチ 例

平行アプローチ
アプローチ方向が検出面の法線に対して±30°を超える場合、あるいは検出面と平行に移動しながら近づく場合は、単純な直交計算ではリスクをカバーできません。斜めからの侵入では、センサーの有効分解能が変化したり、センサーと危険源の間に入り込むリスクが生じたりするため、第9章(平行アプローチ)やその他の角度付きアプローチに関する複雑な計算が必要となります。
第8章:直交アプローチにおける、さまざまな計算
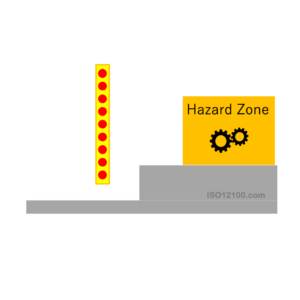
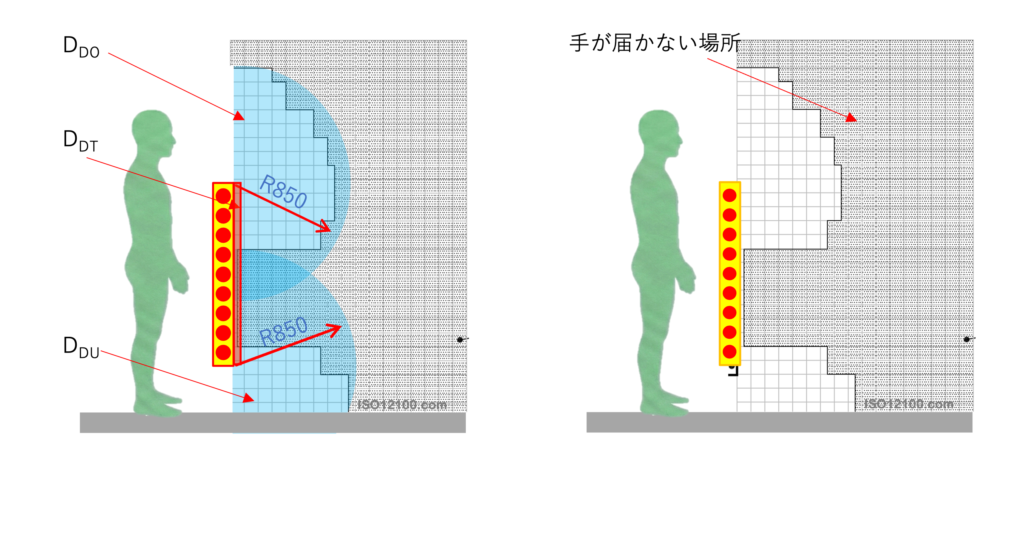
第8章は、産業現場で最も一般的な「垂直設置されたライトカーテンに向かって、人が正面から歩いてくる」ケースなどを扱います。ISO 13855:2024 における最大の変更点は、保護装置に関連する追加距離 DDS(旧規格の C に相当)の決定プロセスが、3つの侵入形態の「最大値」を採用するという厳格なルールに変更された点です。
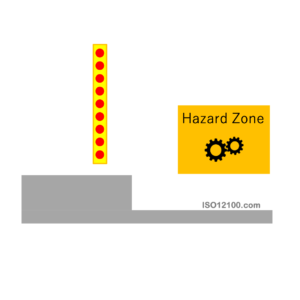
下記の図は、安全装置などが垂直に設置されている場所へ真っ直ぐ近づくケースにおいて、指が隙間から危険な場所に触れないよう「どこまで指が届くか」を考慮した検知エリアの仕組みを説明しています。
分離距離の基本式と最大化原則
分離距離 S を求める基本式は以下の通りです。
$$S = (K \times T) + D_{DS} + Z$$
そして、今回の改定で導入された最も重要な概念が、以下の 到達距離 DDS の定義です。
$$D_{DS} = \max(D_{DO}, D_{DT}, D_{DU})$$
設計者は、以下の3つの値を個別に計算し、その中で最も数値が大きいもの(最悪ケース)を DDS として採用しなければなりません。
- DDO (Distance Reaching Over): 上から乗り越える距離
- DDT (Distance Reaching Through): 隙間をすり抜ける距離
- DDU (Distance Reaching Under): 下から潜り込む距離
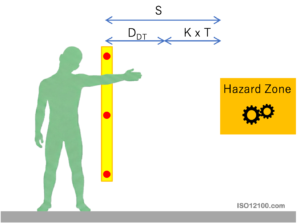
すり抜けによる到達 DDT (Distance Through)
これは、センサーの光軸の隙間などを、指や腕がすり抜けて危険源へ近づく距離です。センサーの検出能力 d(分解能)に応じて、計算式が3つのパターンに分かれます。
垂直検出ゾーンを通過する 例

de ≤ 40mm の場合(指・手の検出)
高分解能のライトカーテンなどが該当します。有効検出能力 de が40mm 以下である垂直な検出ゾーンを、人がすり抜けて検知されずにアクセスすることを防ぐためには、適切な分離距離 S が必要となります。
$$S = (K \times T) + D_{DT} + Z$$
- S: 必要な分離距離
- K: 人のアプローチ速度 (2000mm/s を使用)
- T: システム全体の応答時間
- DDT: 垂直な検出ゾーンをすり抜けて到達する距離
- Z: アプリケーション固有の補足的な距離要素
すり抜け到達距離 DDT の計算
$$D_{DT} = 8 \times (d_e – 14)$$
ただし、計算結果がゼロ未満になる場合は DDT をゼロとします。K に2000mm/s を代入し、DDT に数式を代入すると、分離距離 S を算出するための以下の数式が得られます。
$$ S=(2000\times T) + 8 (d_e – 14) + Z $$
この数式は、分離距離 S が500mm 以下の場合に適用されます。ただし、分離距離 S の最小値は100mm 以上でなければなりません。もし、分離距離 S の値が500mm を超える場合は、アプローチ速度 K を1600mm/s とし、以下の数式を使用します。
$$ S=(1600\times T) + 8 (d_e – 14) + Z $$
この場合、分離距離 S の最小値は500mm 以上でなければなりません。
40mm < de ≤ 55mm の場合(手・腕の検出)
ここが2024年版の新しいポイントです。従来は段階的な値でしたが、新たに線形補間式が導入されました。有効検出能力 deが 40mm より大きく55mm 以下の範囲にある場合、垂直検出ゾーンを通過する到達距離 DDT は、次の式で計算されます。これは、危険源から検出ゾーンまでの分離距離 S は、作業者が危険源に到達する前に機械が完全に停止するために必要な距離であり、以下の基本的な考え方に基づいて計算されます。
$$S = (K \times T) + D_{DT} + Z$$
- K: 人のアプローチ速度です。通常、垂直方向へのアプローチ速度として2000mm/s が標準的に使用されます。
- T: システム全体の応答時間です。これには、安全保護装置(ライトカーテンなど)の応答時間、機械制御システムの応答時間、そして機械が完全に停止するまでの時間など、すべての遅延時間が含まれます。
- DDT: 垂直検出ゾーンを通過する到達距離です。
- Z: 危険源への補足的な距離要素です。特定の設置状況や用途において、必要に応じて加算される距離です
垂直検出ゾーンをすり抜ける到達距離 DDT の計算
$$D_{DT} = 208 + 12 \times (d_e – 40)$$
式中の 208mm という値は、有効検出能力 de が14mm から40mm の範囲に適用される別の計算式に基づいて算出されたものです。これにより、分解能50mm の多光軸センサーなどを使用する際、過剰な安全距離を取らなくても済むよう、性能に見合った合理的な距離が算出できるようになりました。
垂直検出ゾーンの場合、分離距離 S の計算式
$$ S=(2000\times T) + 12 d_e – 272 + Z $$
安全距離が500mm を超える場合の代替計算
分離距離 S が500mm を超える場合、人のアプローチ速度 K として1600mm/s を使用します。
$$ S=(1600\times T) + 12 d_e – 272 + Z $$
ただし、この代替計算式 を使用した場合でも、計算された安全距離S は 最低でも500mm としなければなりません。計算結果が500mm 未満になったとしても、安全距離は500mm として設定する必要があります。
55mm < de ≤ 120mm の場合の分離距離 (人体検出)
有効検出能力 de が55mm より大きく120mm 以下の範囲にある垂直検出ゾーン使用する場合の分離距離計算は以下の式を使います。
$$D_{DT} = 850 \text{ mm}$$
- T: システム全体の応答時間。安全保護装置、制御システム、機械の停止時間など全ての遅延時間の合計です。
- Z: 危険源への補足的な距離要素。必要に応じて加算します。
$$ S=(1600\times T) + 850 + Z$$
有効検出能力 de が55mm 以上では、アプローチ速度 K として1600mm/s を使用し、垂直検出ゾーンを通過する到達距離 DDT として850mm を使用します。この850mm という到達距離は、人の標準的な腕の長さとして考慮されている値です。
de が 120mm を超える、または定義されていない場合
有効検出能力 de が120mm を超える、または 定義されていないタイプの垂直検出ゾーン及びESPE を使用する際の重要な点について説明します。これには、複数のビームを使用するライトカーテンや、シングルビームを複数配置した構成などが該当する場合があります。
垂直検出ゾーンを貫通する有効検出能力 de>120mm または未定義 例
この範囲のESPEの特性と検出能力
有効検出能力 de が120mm を超える、または定義されていないESPE は、作業者の「全身」が危険ゾーンにアクセスしたことを検出する用途には使用可能です。しかし、de の値が大きい、または不定であるため、手、指、または上肢・下肢といった小さな体の部分の侵入を確実に検出する用途には適していません。
分離距離 S の計算
全身アクセス検出のみを目的としてこれらのESPE を使用する場合、危険ゾーンからの分離距離 S は、以下の計算式に従って計算する必要があります。
$$ S=(1600\times T) + 850 + Z$$
この計算式は、アプローチ速度 K を1600mm/s、垂直検出ゾーンを通過する到達距離 DDT を850mm として、基本的な分離距離計算式から導かれています。850mm という値は、人の標準的な腕の長さとして考慮されています。
- T: システム全体の応答時間。安全保護装置、制御システム、機械の停止時間など全ての遅延時間の合計です。
- Z: 危険源への補足的な距離要素。必要に応じて加算します。
回避方法(すり抜けなど)の考慮
複数のビームを使用するライトカーテンやシングルビームの配置構成を用いる場合、作業者が意図的に、あるいは不注意によって検出ゾーンを回避する可能性が予見されます。例えば、以下のような状況が考えられます。
- 最も低いビームの下をくぐる
- 最も高いビームの上を越える
- 二つのビームの間をすり抜ける(体の小さな部分や、角度によっては全身も含む)
これらの回避方法を防止するための対策を、ESPE の選定や配置設計において十分に考慮することが重要です。
上方からの到達 DDO (Distance Over)
検出ゾーンの上端を乗り越えて、危険源へ手を伸ばすリスクアセスメントをします。
$$S = (K \times T) + D_{DO} + Z$$
- S: 必要な分離距離 (mm)
- K: 人のアプローチ速度 (mm/s)
- T: システムの応答時間 (s)
- DDO: 乗り越え到達距離 (mm) – 表2から参照
- Z: 補足的な距離要素 (mm) – 必要に応じて考慮
このとき DDO は計算式ではなく、表2を参照して決定します。基準面からの危険源の高さ HH と検出ゾーンの上端高さ HDT の2つのパラメータから値を読み取ります。
垂直検知ゾーンを越えて到達する 例
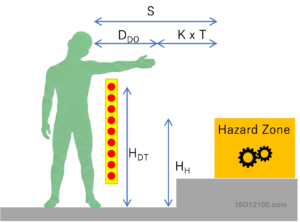
表2 垂直検出ゾーンを越えて到達する場合
| 基準面からの危険ゾーンの高さ HH | 検出ゾーンの上端から基準面までの高さ HDT | |||||||||||
| 900 | 1000 | 1100 | 1200 | 1300 | 1400 | 1600 | 1800 | 2000 | 2200 | 2400 | 2600 | |
| 垂直検出ゾーンにおける到達距離 DDO | ||||||||||||
| 2600 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2500 | 400 | 400 | 350 | 300 | 300 | 300 | 300 | 300 | 250 | 150 | 100 | 0 |
| 2400 | 550 | 550 | 550 | 500 | 450 | 450 | 400 | 400 | 300 | 250 | 100 | 0 |
| 2200 | 800 | 750 | 750 | 700 | 650 | 650 | 600 | 550 | 400 | 250 | 0 | 0 |
| 2000 | 950 | 950 | 850 | 850 | 800 | 750 | 700 | 550 | 400 | 0 | 0 | 0 |
| 1800 | 1100 | 1100 | 950 | 950 | 850 | 800 | 750 | 550 | 0 | 0 | 0 | 0 |
| 1600 | 1150 | 1150 | 1100 | 1000 | 900 | 850 | 750 | 450 | 0 | 0 | 0 | 0 |
| 1400 | 1200 | 1200 | 1100 | 1000 | 900 | 850 | 650 | 0 | 0 | 0 | 0 | 0 |
| 1200 | 1200 | 1200 | 1100 | 1000 | 850 | 800 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1000 | 1200 | 1150 | 1050 | 950 | 750 | 700 | 0 | 0 | 0 | 0 | 0 | 0 |
| 800 | 1150 | 1050 | 950 | 800 | 500 | 450 | 0 | 0 | 0 | 0 | 0 | 0 |
| 600 | 1050 | 950 | 750 | 550 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 400 | 900 | 700 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 200 | 600 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
ただし、検出ゾーンの上端の高さ HDT が900mm 未満のESPE は、回避や乗り越えに対する十分な保護機能がないため、対象として含まれていません。SRMCD の位置を決定する場合、危険ゾーンの高さの代わりにSRMCD の高さを用いて表2を適用ができます。
計算手順とアプローチ速度 K の選択
まず、アプローチ速度K=2000mm/s を使用します。
$$S = (2000 \times T) + D_{DO} + Z$$
- この式は S が500 mm 以下の場合に適用されます。
- ただし、S の最小値は 100 mm を下回ってはなりません。
ステップ1 の計算結果が500mm を超える場合、アプローチ速度K=1600mm/s を使用し再計算します。
$$S = (1600 \times T) + D_{DO} + Z$$
- この場合、S の値は 500mm 未満になってはなりません。
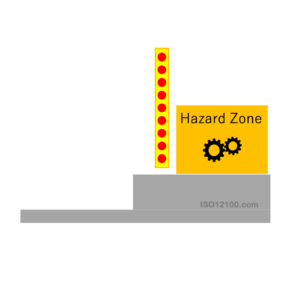
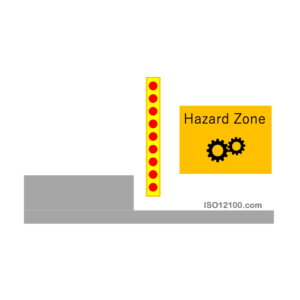
下方からの潜り込み DDU (Distance Under)
今回の改定で最も影響が大きいのが、この「潜り込み」に関する規定です。
センサーの下端と床面(基準面)との間に隙間がある場合、そこから身体の一部を滑り込ませるリスクを厳密に計算します。
前提条件
検出ゾーンの下端高さ HDB は300mm 以下でなければなりません。300mm を超えると、全身が潜り抜けてしまうため、垂直検出としての要件を満たさなくなります。
計算式
$$D_{DU} = 8 \times (d + H_{DB} – 14)$$
ここで、d は検出能力、HDB は床面から検出ゾーン下端までの隙間の距離です。
実務上の重要ポイント
この計算式を見ると、HDB(床の隙間)が大きくなればなるほど、DDU が劇的に増大することがわかります。例えば、掃除のしやすさを考えて床から200mm の隙間を空けて設置した場合、
$$8 \times (14 + 200 – 14) = 1600 \text{ mm}$$
となり、なんと 1.6m もの追加距離が必要になってしまいます。これを避けるためには、センサーを床面ギリギリに設置するか、下部に遮蔽板を設けて物理的に隙間を塞ぐ設計が不可欠となります。
この記事を最後までお読みいただき、ありがとうございます。今回の内容、少し長めだったかもしれませんが、いかがでしたでしょうか?「分離距離計算」というテーマに触れると、苦手意識を持たれる方も多いと感じています。でも、焦らずゆっくりと考えていけば、実はそこまで難しいものではありません。
この記事では、分離距離計算に対する基本的な考え方や整理方法をお伝えしました。もし少しでも「なるほど、こう考えればいいのか」と感じていただけたなら、とても嬉しいです。技術的な話題は時に複雑に思えることもありますが、一つひとつ丁寧に向き合っていけば、自然と理解が深まるものです。
さて、次回は今回の続編として「分離距離」に関するさらに深い内容を掘り下げていきたいと思っています。具体的には、実際の応用例や、計算時によくあるミスの回避方法などを取り上げる予定です。
それでは、また次回の記事でお会いしましょう。読んでくださって、本当にありがとうございました!